

הבדל ביצועי מנוע 1: מהירות/מומנט/גודל
ישנם כל מיני מנועים בעולם. מנוע גדול ומנוע קטן. מנוע שנע קדימה ואחורה במקום להסתובב. מנוע שבמבט ראשון לא ברור מדוע הוא כל כך יקר. עם זאת, כל המנועים נבחרים מסיבה מסוימת. אז איזה סוג של מנוע, ביצועים או מאפיינים צריך להיות למנוע האידיאלי שלך?
מטרת סדרה זו היא לספק ידע כיצד לבחור את המנוע האידיאלי. אנו מקווים שזה יהיה שימושי כשתבחרו מנוע. ואנו מקווים שזה יעזור לאנשים ללמוד את יסודות המנועים.
הבדלי הביצועים שיוסברו יחולקו לשני חלקים נפרדים כדלקמן:
מהירות/מומנט/גודל/מחיר ← הפריטים שנדון בהם בפרק זה
דיוק מהירות/חלקות/אורך חיים ותחזוקה/יצירת אבק/יעילות/חום
ייצור חשמל/רטט ורעש/אמצעי נגד פליטה/סביבת שימוש
1. ציפיות מהמנוע: תנועה סיבובית
מנוע מתייחס בדרך כלל למנוע שמקבל אנרגיה מכנית מאנרגיה חשמלית, וברוב המקרים מתייחס למנוע שמקבל תנועה סיבובית. (יש גם מנוע ליניארי שמקבל תנועה ישרה, אבל נעזוב אותו הפעם.)
אז, איזה סוג סיבוב אתם רוצים? האם אתם רוצים שהוא יסתובב בעוצמה כמו מקדחה, או שאתם רוצים שהוא יסתובב חלש אך במהירות גבוהה כמו מאוורר חשמלי? על ידי התמקדות בהבדל בתנועה הסיבובית הרצויה, שתי התכונות של מהירות סיבוב ומומנט הופכות לחשובות.
2. מומנט
מומנט הוא כוח הסיבוב. יחידת המדידה של מומנט היא ניוטון מטר, אך במקרה של מנועים קטנים, משתמשים בדרך כלל ב-m ניוטון מטר.
המנוע תוכנן בדרכים שונות כדי להגביר את המומנט. ככל שיש יותר סיבובים של החוט האלקטרומגנטי, כך גדל המומנט.
מכיוון שמספר הסלילים מוגבל על ידי גודל הסליל הקבוע, משתמשים בחוט מצופה אמייל בקוטר חוט גדול יותר.
סדרת המנועים ללא מברשות שלנו (TEC) עם 8 סוגים של קוטר חיצוני של 16 מ"מ, 20 מ"מ ו-22 מ"מ ו-24 מ"מ, 28 מ"מ, 36 מ"מ, 42 מ"מ, ו-8 סוגים. מכיוון שגודל הסליל גדל גם הוא עם קוטר המנוע, ניתן להשיג מומנט גבוה יותר.
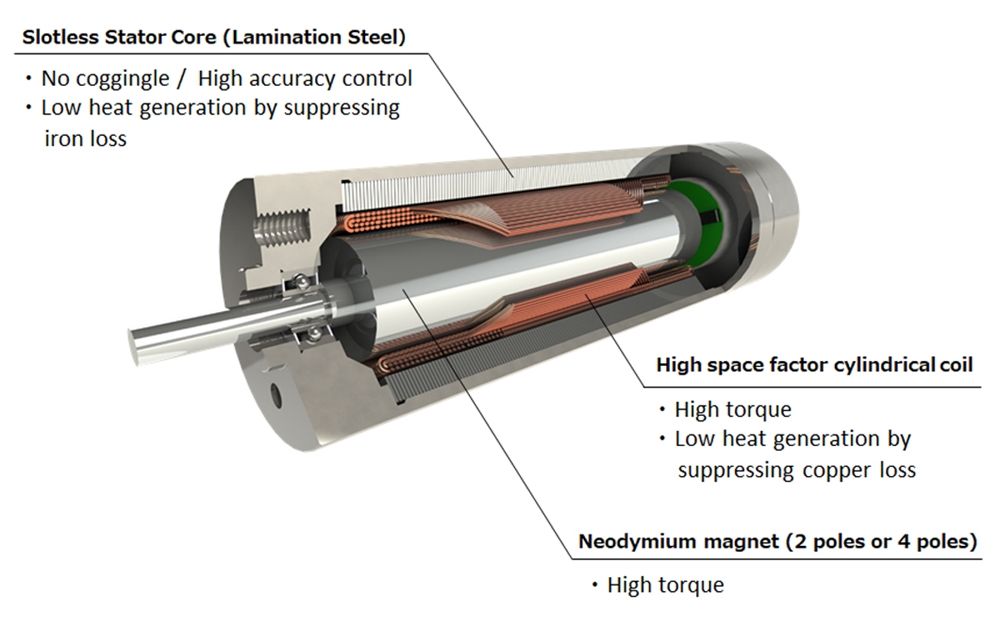
מגנטים רבי עוצמה משמשים ליצירת מומנטים גדולים מבלי לשנות את גודל המנוע. מגנטים של ניאודימיום הם המגנטים הקבועים החזקים ביותר, ואחריהם מגנטים של סמריום-קובלט. עם זאת, גם אם משתמשים רק במגנטים חזקים, הכוח המגנטי ידלוף מהמנוע, והכוח המגנטי הדולף לא יתרום למומנט.
כדי לנצל את מלוא היתרונות של המגנטיות החזקה, חומר פונקציונלי דק הנקרא לוח פלדה אלקטרומגנטית עובר למינציה כדי לייעל את המעגל המגנטי.
יתר על כן, מכיוון שהכוח המגנטי של מגנטים מסמריום קובלט יציב לשינויי טמפרטורה, השימוש במגנטים מסמריום קובלט יכול להניע את המנוע ביציבות בסביבה עם שינויי טמפרטורה גדולים או טמפרטורות גבוהות.
3. מהירות (סיבובים)
מספר הסיבובים של מנוע מכונה לעתים קרובות "מהירות". זוהי הביצועים של מספר הסיבובים שהמנוע מסתובב ביחידת זמן. למרות ש-"סל"ד" משמש בדרך כלל כסיבובים לדקה, הוא מבוטא גם כ-"דקה-1" במערכת היחידות SI.
בהשוואה למומנט, הגדלת מספר הסיבובים אינה קשה מבחינה טכנית. פשוט הפחיתו את מספר הסיבובים בסליל כדי להגדיל את מספר הסיבובים. עם זאת, מכיוון שהמומנט פוחת ככל שמספר הסיבובים עולה, חשוב לעמוד הן בדרישות המומנט והן בדרישות הסיבוב.
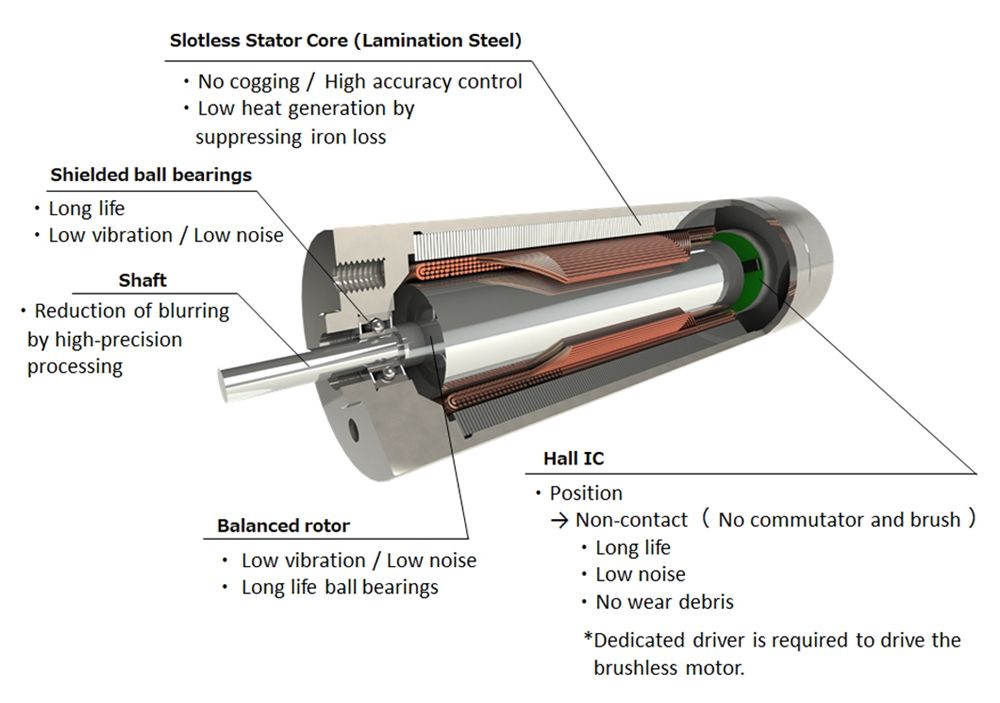
בנוסף, אם משתמשים במהירות גבוהה, עדיף להשתמש במיסבים כדוריים ולא במיסבים רגילים. ככל שהמהירות גבוהה יותר, כך אובדן ההתנגדות לחיכוך גדול יותר, כך חיי המנוע קצרים יותר.
בהתאם לדיוק הציר, ככל שהמהירות גבוהה יותר, כך גדלות בעיות הרעש והוויברציות. מכיוון שלמנוע ללא מברשות אין מברשת וגם לא קומוטטור, הוא מייצר פחות רעש ורעידות מאשר מנוע עם מברשות (מה שמביא את המברשת למגע עם הקומוטטור המסתובב).
שלב 3: גודל
כשמדובר במנוע האידיאלי, גודל המנוע הוא גם אחד הגורמים החשובים לביצועים. גם אם המהירות (סיבובים) והמומנט מספיקים, אין טעם אם לא ניתן להתקין אותו על המוצר הסופי.
אם אתם רק רוצים להגביר את המהירות, אתם יכולים להפחית את מספר הסיבובים של החוט, גם אם מספר הסיבובים קטן, אך אלא אם כן יש מומנט מינימלי, הוא לא יסתובב. לכן, יש צורך למצוא דרכים להגביר את המומנט.
בנוסף לשימוש במגנטים החזקים הנ"ל, חשוב גם להגדיל את גורם מחזור העבודה של הסליל. דיברנו על הפחתת מספר סלילי החוט כדי להבטיח את מספר הסיבובים, אך אין זה אומר שהחוט מלופף באופן רופף.
על ידי שימוש בחוטים עבים במקום להפחית את מספר הסלילים, יכולות לזרום כמויות גדולות של זרם וניתן להשיג מומנט גבוה אפילו באותה מהירות. המקדם המרחבי הוא אינדיקטור לאופן שבו החוט מלופף. בין אם מדובר בהגדלת מספר הסלילים הדקים או בהפחתת מספר הסלילים העבים, זהו גורם חשוב בהשגת מומנט.
באופן כללי, תפוקת המנוע תלויה בשני גורמים: ברזל (מגנט) ונחושת (סלילוף).
זמן פרסום: 21 ביולי 2023